

產(chǎn)品描述
型號參數(shù)
資料下載
產(chǎn)品描述
Z-Arm 1632 核心參數(shù)
| ±0.02mm | 1Kg |
| 重復(fù)定位精度 | 最大負載 |
| 320mm | 160mm |
| 臂長(1軸 + 2?軸) | Z?軸行程 |
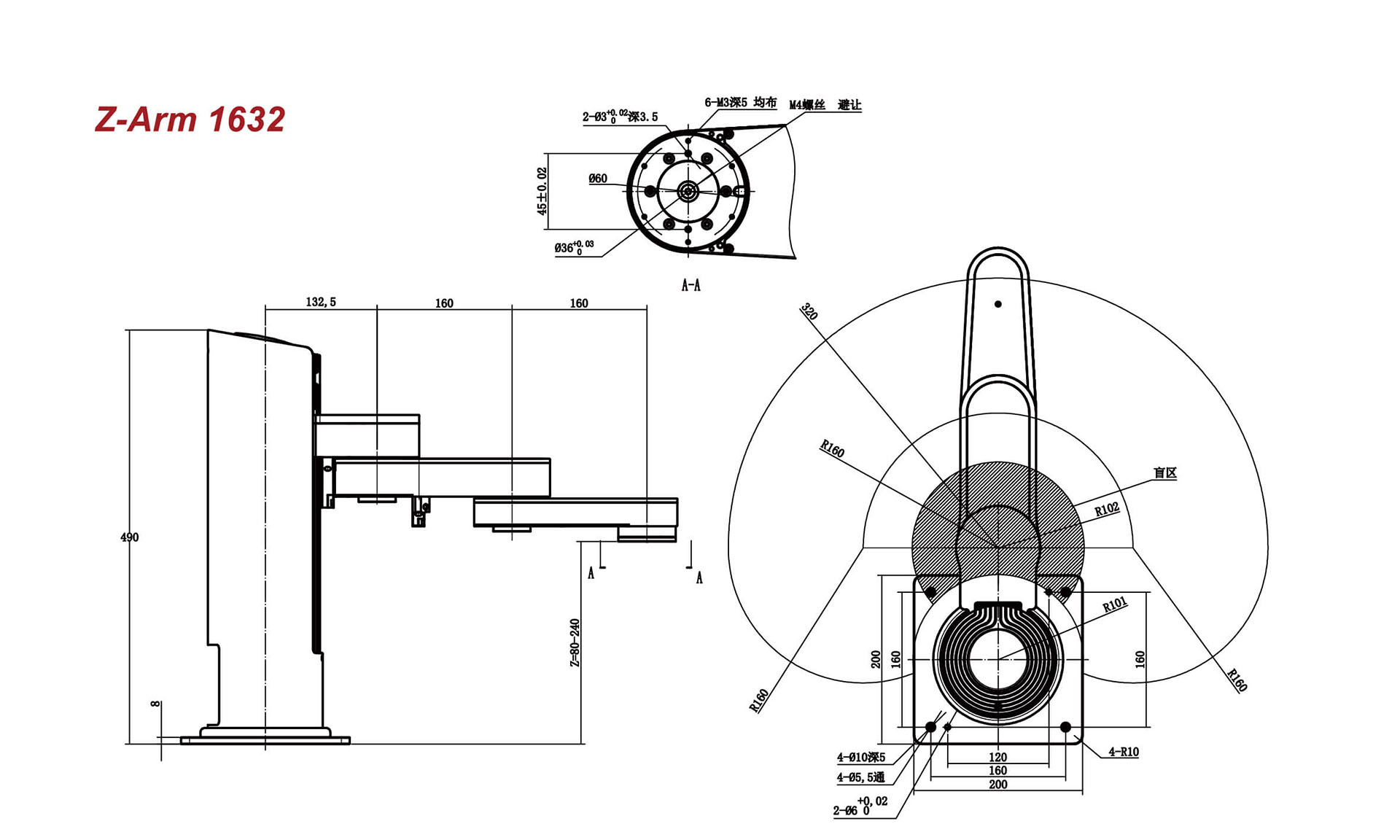
| *范圍尺寸圖 |
 |
產(chǎn)品亮點
可靠的精度
HITBOT Z-Arm 1632得益于自行開發(fā)的伺服電機,精密的光學(xué)編碼器和定制的驅(qū)動器算法,可將重復(fù)精度保持在±0.02mm。用戶將永遠不必擔(dān)心在其工作范圍內(nèi)發(fā)生任何可能的錯誤-手臂伸直至320mm,Z軸伸直至160mm。
體積小,適合桌面級自動化
HITBOT Z-Arm 1632的緊湊設(shè)計(250x250x490mm)使它幾乎可以放置在適合的任何位置,例如在生產(chǎn)線的拐角處或靠近其他機器。Z臂1632重量僅為10千克,也很輕便,可以根據(jù)特定的制造需求輕松部署/重新部署。
簡單編程,20分鐘輕松搞定!
HITBOT Z-Arm 1632十分智能,只需將臂拖放到特定點或在HitbotStudio APP中設(shè)置規(guī)格,就無需編程經(jīng)驗的操作員即可完成編程過程,總共僅需20分鐘。
人機協(xié)作
HITBOT Z-Arm 1632是一款智能協(xié)作機器人,不僅可以替代沉悶和重復(fù)勞累的工人,而且還可以與工人合作以提高效率。它支持碰撞檢測以減少潛在事故。同時確保生產(chǎn)率和安全性!
開箱即用
HITBOT將Z-Arm 1632打包為現(xiàn)成的機器, 整機發(fā)貨。用戶可以立即使用HITBOT Z-Arm進行自動化生產(chǎn)操作。插入并打開電源,工作臺上的生產(chǎn)率立即提高!
多種用途
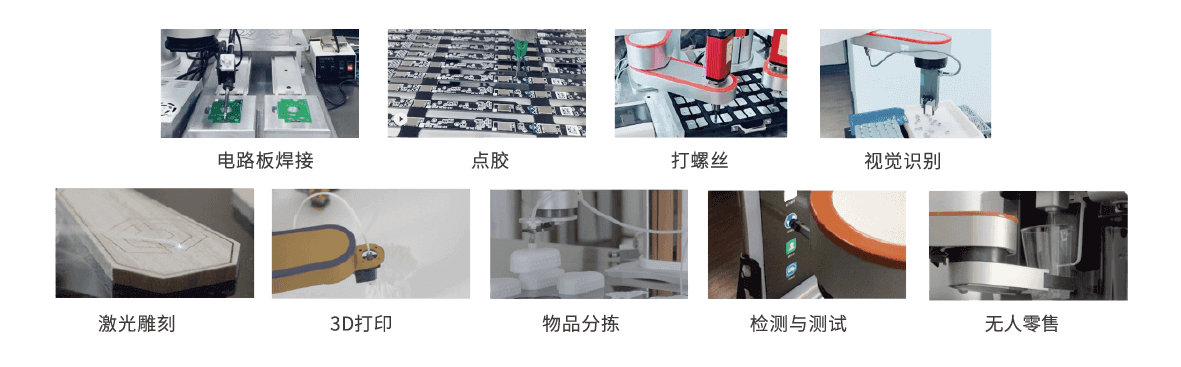
HITBOT Z-Arm 1632絕對是一種多功能臂,擅長在各種布局和不同行業(yè)中處理事務(wù),例如視覺分揀,組件裝配,電子焊接等。
接口面板使用功能
A處底座接口示意圖
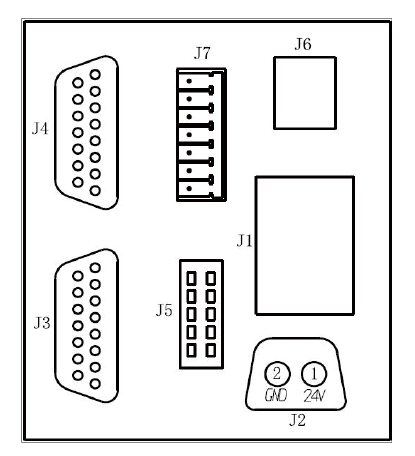
圖1
圖1接口定義說明
① J1為電源開關(guān)接口,用于控制電源通斷。
② J2為電源輸入口,24V直流電壓源輸入。
③ J3為IO輸出口,內(nèi)部9組光耦隔離NPN輸出。
④ 為脈沖控制輸入。
⑤ 為內(nèi)部電源 GND。
⑥ J6為以太網(wǎng)口,用于電腦上位機通訊
⑦ J7為IO擴展口,內(nèi)部3組共地光耦隔離輸入
B處小端臂下側(cè)接口控制Z-EFG-20/Z-EFG-8電爪示意圖
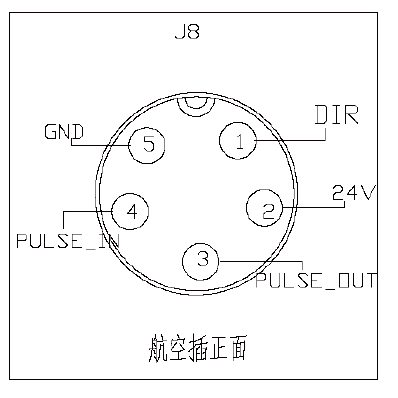
圖2
圖2接口定義說明
① 為內(nèi)部輸出方向控制。
② 為內(nèi)部電源 24V輸出。
③ 為內(nèi)部控制脈沖輸出。
④ 為脈沖控制輸入。
⑤ 為內(nèi)部電源 GND。
應(yīng)用場景
型號參數(shù)
| 產(chǎn)品型號 | Z-Arm 1632 |
| 編程軟件 | HitbotStudio |
| 軸數(shù) | 4 |
| 額定負載 | 0.5KG |
| 最大負載 | 1KG |
| 最大臂展 | 320mm |
| 一軸臂展 | 160mm |
| 二軸臂展 | 160mm |
| 一軸旋轉(zhuǎn)范圍 | ±90° |
| 二軸旋轉(zhuǎn)范圍 | ±143° |
| Z軸行程 | 160mm |
| 速度 | 1017mm/s(負載0.5KG) |
資料下載

